The market has developed an enormous number of different types of robots and appeared the need to divide them in the following main characteristics:
- Coordinate systems;
- Power source;
- Method of control;
- Programming method.
Robotics is a never ending developing field and the need for higher productivity with lower costs is its main booster.
“An automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications.”
The market has developed an enormous number of different types of robots and appeared the need to divide them in the following main characteristics:
The main advantages of the Articulated robots are:
These robots are usually used for:
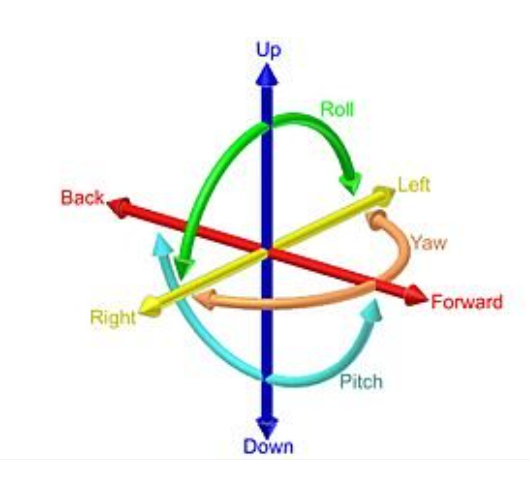
A joint-arm robot often has 6 axes because it provides the robot with the ability to reach any point within its working envelope, and orient its end effector in any direction. Each axis provides a degree of freedom, and with 6 axes, the robot can move forward/backward, up/down, left/right, and rotate about three perpendicular axes. This allows the robot to perform complex tasks and movements, such as welding, painting, and assembly.
The harmonic drive is important for the preciseness of a joint-arm robot because it is a type of gear mechanism that provides high reduction ratios, high torque capacity, and high positional accuracy.
The harmonic drive achieves this by using a unique operating principle that involves the elastic deformation of a flexible spline.
This allows the drive to achieve zero backlash, which means there is no play or lost motion between the input and output shafts.
This results in very precise positioning and motion control, making it an ideal choice for joint-arm robots that require high levels of accuracy and repeatability.
An RV (Rotary Vector) gear is a type of precision reduction gear that is commonly used in industrial robots. It is similar to a harmonic drive in that it provides high reduction ratios, high torque capacity, and high positional accuracy. However, there are some key differences between the two types of gears. RV gears use a cycloidal mechanism, which consists of an eccentric bearing, a cycloidal disk, and a set of pins. This mechanism allows the RV gear to achieve high reduction ratios and high torque capacity while maintaining a compact size. In contrast, harmonic drives use a flexible spline and a circular spline to achieve high reduction ratios. Both types of gears have their advantages and disadvantages, and the choice between them depends on the specific requirements of the application.
RV gears and harmonic drives are both types of precision reduction gears commonly used in industrial robots. While they share some similarities, there are also some key differences between them, including their advantages. Some of the advantages of RV gears compared to harmonic drives include:
These are some of the advantages of RV gears compared to harmonic drives. However, the choice between the two types of gears ultimately depends on the specific requirements of the application.
IWE/IWS/IWT
IWE/IWT only
We like to think along with you in finding solutions for your (welding) automation, welding wires and welding accessories. We are looking for the connection and prefer to be a partner rather than a supplier.